-

Fall 2018
Our Humble Beginnings
Our team was created in Fall 2018 within the ECE 4011 class. After going through the application process we each settled on the Power Vault Inspection Robot. One semester later we submitted a Spring proposal and began to get to work.
-

Jan 2019
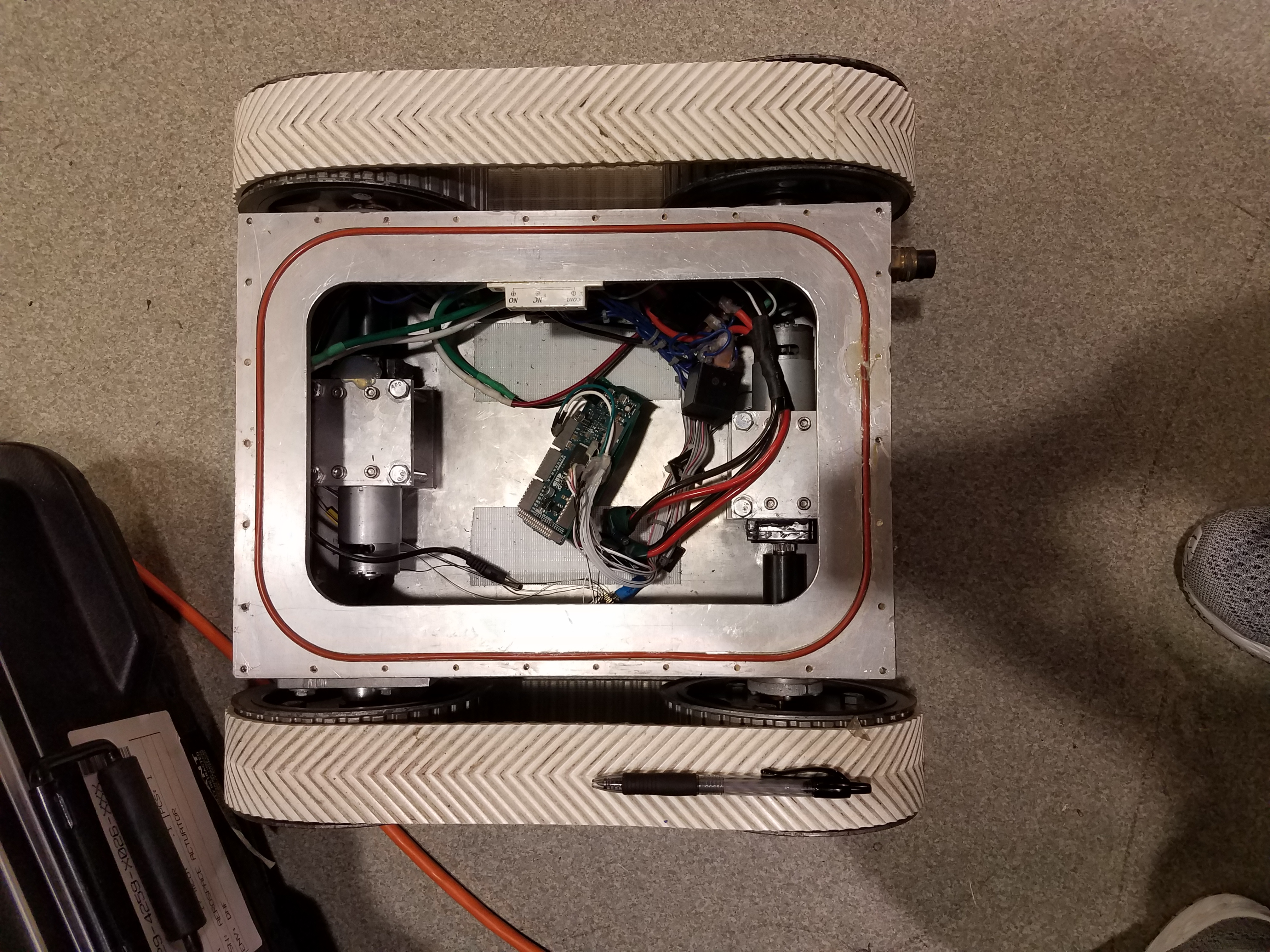
Initial Thoughts
Due to our proposal being completed we now had direction when it came to purchases and our method for prototyping. As a result we found that we had quite a bit of mechanical work to do.
-

Feb - Mar 2019
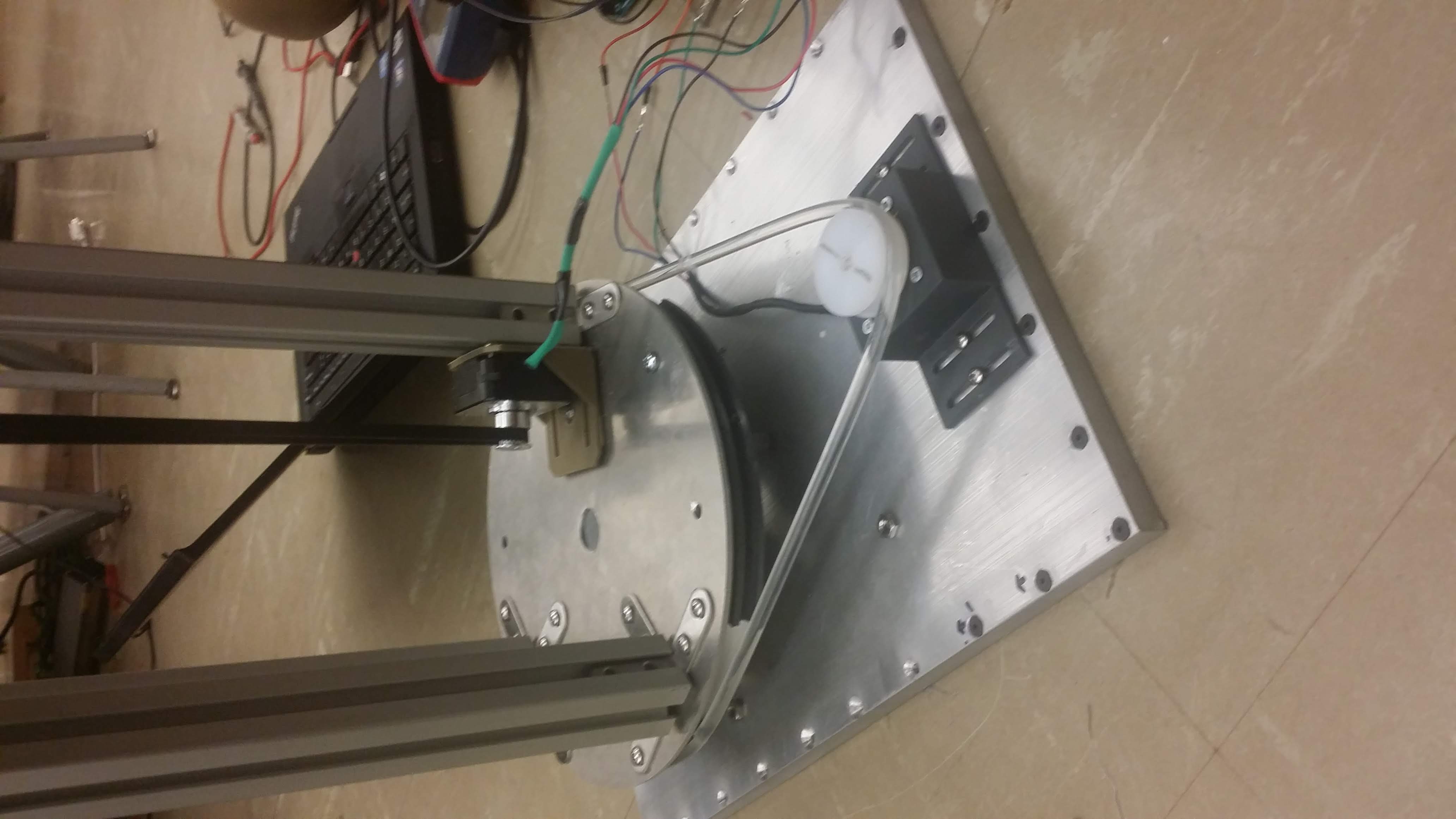
So much CAD it'll make you mad.
Creating the CAD files for the mechanical arm was an extremely tedious task. There were a lot of moving parts, this precison and accruacy were the desired needs. Therefore the replica required a lot of time with CAD alone.
-

Mar - Apr 2019
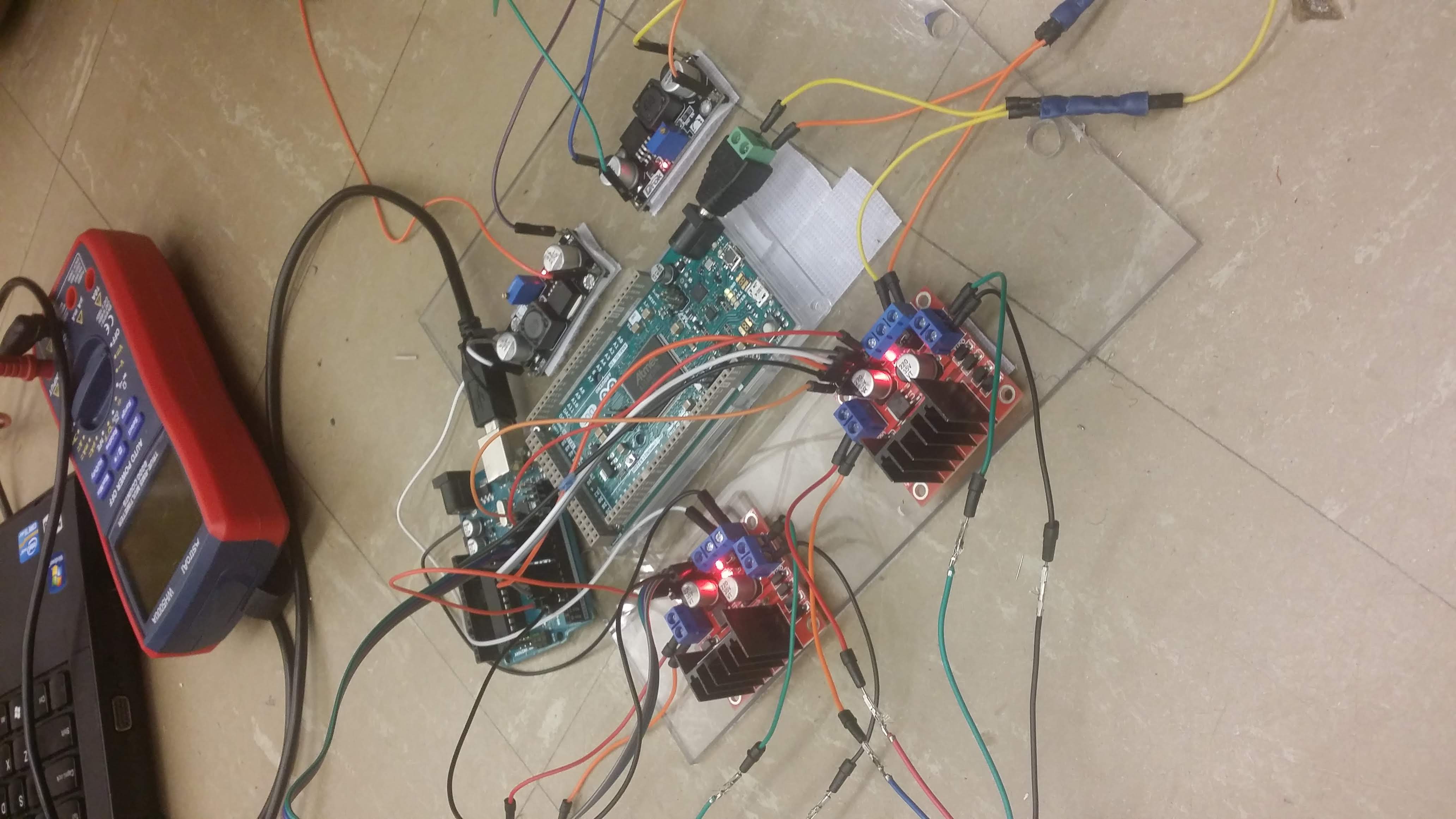
Software is a bridge
Developing the communication protocol for the robot using MQTT. This enabled the microcontrollers to communicate with each other.
-
Apr - May 2019
Preparing for Expo
During this time we created the poster, finalized our website, presentation, completed our written report, and presented at 2019 Senior Capstone Expo!